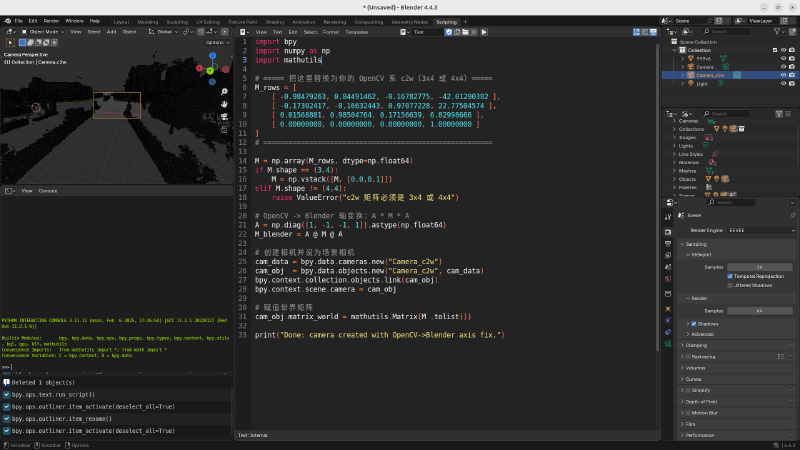
COLMAP Camera Visualizer Validating camera extrinsics and intrinsics from COLMAP can often be an opaque and challenging process. To address this, I developed a pipeline designed to bridge the gap between COLMAP and Blender. This tool converts COLMAP extrinsic data into standard World-to-Camera (w2c) and Camera-to-World (c2w) RT matrices, automatically generating cameras within Blender. This visualization not only makes it effortless to verify pose accuracy but also enables intuitive camera editing and inspection in a 3D space.
Click here to get the repositories(https://github.com/Henry-city/colmap-camera-visualizer)